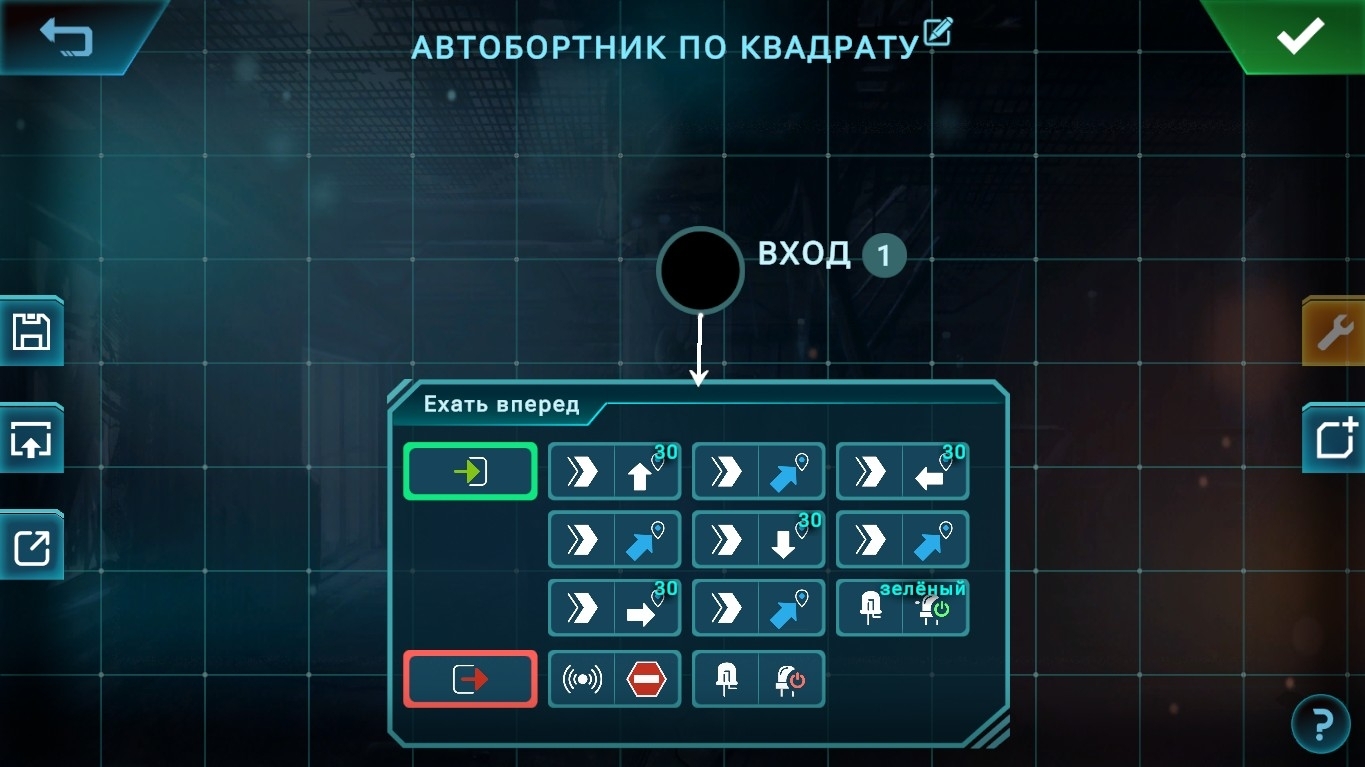
В виртуальной среде робот идет по координатам точно и предсказуемо. В реальности он может не вписаться в поворот, выехать за пределы поля или остановиться не там, где было задумано. На занятии кружка «Виртуальная робототехника» Наталья Сергеевна Павлова, педагог дополнительного образования БУ ДО «Омская областная СЮТ», предложила школьникам проверить это на практике. Ученикам предлагалось перенести модель дрона-автобортника из игры «Берлога: Защита пасеки» в физический мир и научить робота двигаться по координатам на реальном поле.
Игру «Берлога: Защита пасеки» в кружке используют уже два года. За это время ребята приняли участие в финалах I и II Всероссийского киберспортивного турнира по программированию в «Берлоге», а также во всех четырех неделях онлайн-вызова «Царь горы». В игре движение персонажей строится на прямоугольной, или декартовой, системе координат. Для программирования и робототехники это универсальный язык описания пространства. Есть поле, клетки, направление и маршрут.

Перед началом проекта кружковцы провели аналитическую работу, они самостоятельно выделили значимые характеристики навигации в игре, измерили длину и ширину поля, размер клетки, поняли принципы перемещения объекта. Задание педагогического конкурса «Турнир новаторов» состояло в том, чтобы реализовать одну и ту же модель в игре и в реальности. Так появилась задача для занятия, нужно было собрать физического робота по модели дрона-автобортника и проверить, сможет ли он двигаться по координатам так же уверенно, как виртуальный персонаж.
Что дает этот модуль
Этот проект помогает показать школьникам разницу между виртуальной моделью и физическим объектом. В игре траектория идеальна, а в реальности на движение влияют вес, трение, сцепление колес с поверхностью, размер конструкции, состояние моторов и погрешности сборки. Поэтому занятие можно использовать не только на робототехнике, но и при разговоре о координатах, измерениях, расчетах, отладке и инженерной ответственности.
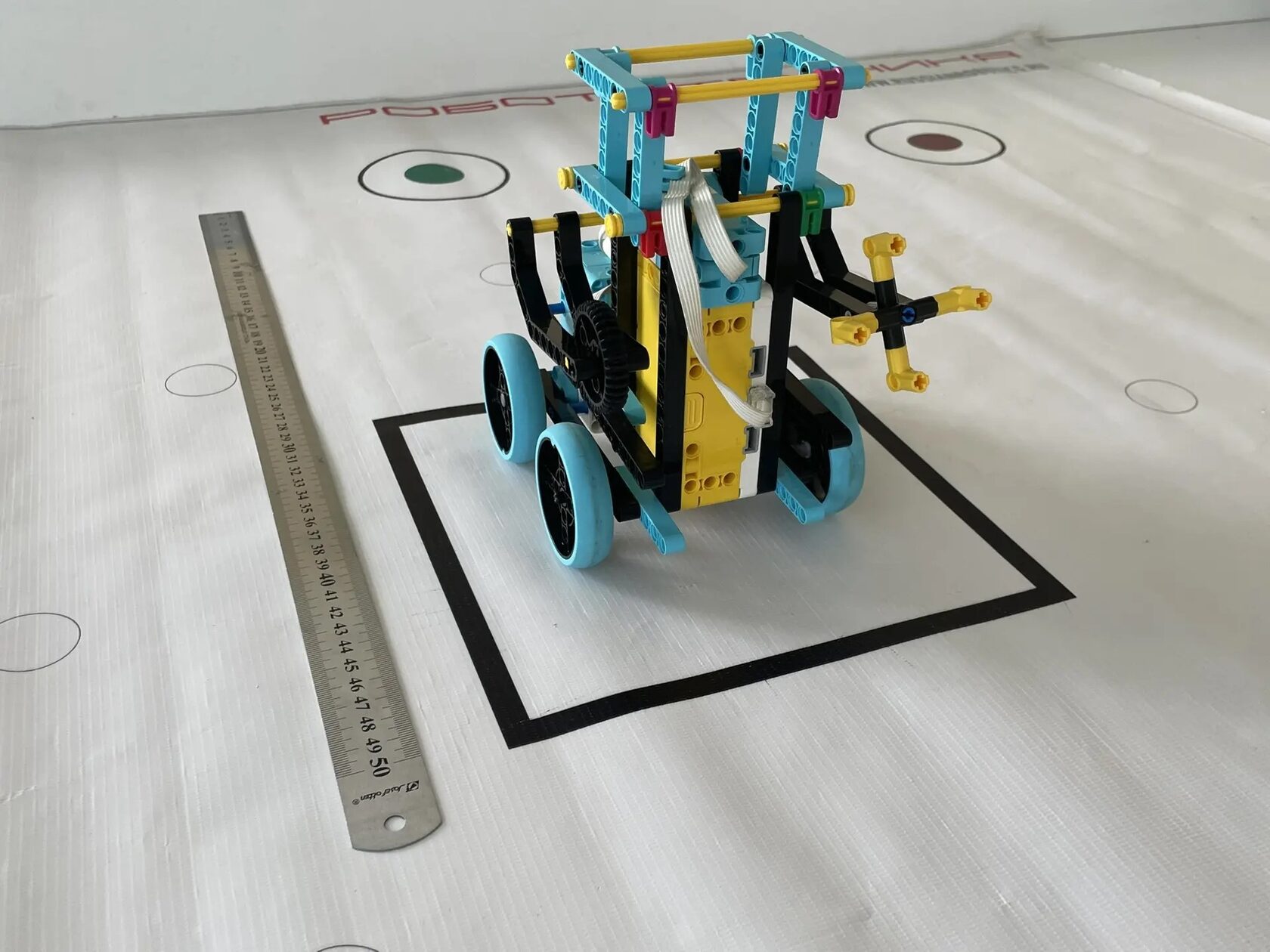
Сначала ученики создали модель автобортника из конструктора LEGO SPIKE Prime. От них требовалось перенести в реальность основные свойства игрового персонажа, например, колесную основу и оружие ближнего боя. Физически робот должен был двигаться вперед и назад, поворачивать, а также имитировать атаку при помощи манипулятора.
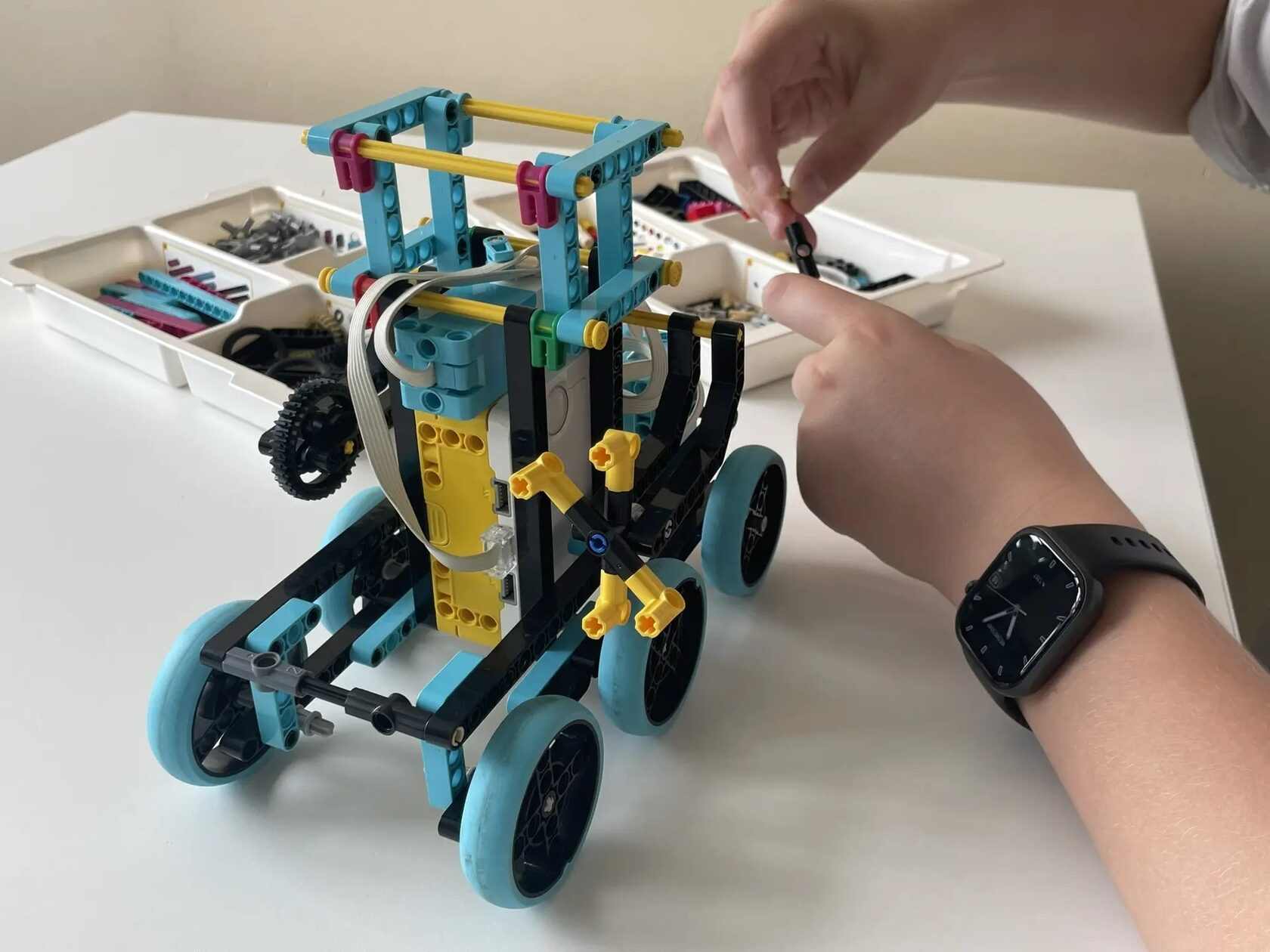
Первая конструкция получилась устойчивой, но громоздкой. У нее были три пары колес, два мотора на задних колесах и еще один мотор в передней части для имитации движения пилы. Поскольку ребята работали не по готовой инструкции, они сами решили, что такая модель будет надежнее. Но проверка на поле «Робофишки» быстро показала проблему. Робот не мог точно проехать по координатам от одной фишки к другой, он оказался больше размера фишки, плохо проходил повороты и не всегда останавливался в нужной зоне. Тогда кружковцы модернизировали конструкцию и оставили две пары колес. После этого робот стал более маневренным и начал лучше попадать в отмеченную область.
Сначала ученики создали модель автобортника из конструктора LEGO SPIKE Prime. От них требовалось перенести в реальность основные свойства игрового персонажа, например, колесную основу и оружие ближнего боя. Физически робот должен был двигаться вперед и назад, поворачивать, а также имитировать атаку при помощи манипулятора.
Первая конструкция получилась устойчивой, но громоздкой. У нее были три пары колес, два мотора на задних колесах и еще один мотор в передней части для имитации движения пилы. Поскольку ребята работали не по готовой инструкции, они сами решили, что такая модель будет надежнее. Но проверка на поле «Робофишки» быстро показала проблему. Робот не мог точно проехать по координатам от одной фишки к другой, он оказался больше размера фишки, плохо проходил повороты и не всегда останавливался в нужной зоне. Тогда кружковцы модернизировали конструкцию и оставили две пары колес. После этого робот стал более маневренным и начал лучше попадать в отмеченную область.
Ошибка как часть инженерной работы
Первую неудачную конструкцию не стоит воспринимать как провал. В этом модуле она становится учебным событием. Дети сами видят, что «устойчивее» не всегда значит «лучше», если задаче нужна маневренность. Такой опыт помогает школьникам понять, что инженерное решение редко получается найти с первого раза, его нужно проверять, сравнивать с задачей и дорабатывать.
Следующий этап оказался сложнее, чем ребята ожидали. Виртуальный дрон движется только в рамках доступного поля игры, он не может случайно выехать за границу мира или «проскользнуть» дальше клетки. Реальный робот таких ограничений не имеет. Он может проехать дальше, чем нужно, уйти в сторону, не повернуть или развернуться шире, чем предполагалось.
Следующий этап оказался сложнее, чем ребята ожидали. Виртуальный дрон движется только в рамках доступного поля игры, он не может случайно выехать за границу мира или «проскользнуть» дальше клетки. Реальный робот таких ограничений не имеет. Он может проехать дальше, чем нужно, уйти в сторону, не повернуть или развернуться шире, чем предполагалось.
Чтобы связать игровую навигацию с физическим движением, кружковцам пришлось рассчитывать количество оборотов колес для заданного расстояния. Ребята вспомнили формулу длины окружности колеса: C = π × d. Так возник важный разговор о разнице между пикселями и координатами в игре, с одной стороны, и сантиметрами, оборотами, трением и массой в реальном мире, с другой.
Но одного расчета оказалось мало. На движение влияли вес робота, материал поля, состояние моторов, сцепление колес с поверхностью и другие нюансы. Все расчеты, наблюдения и результаты тестов ребята фиксировали на интерактивной доске, а затем корректировали программу и конструкцию.
Но одного расчета оказалось мало. На движение влияли вес робота, материал поля, состояние моторов, сцепление колес с поверхностью и другие нюансы. Все расчеты, наблюдения и результаты тестов ребята фиксировали на интерактивной доске, а затем корректировали программу и конструкцию.
Что обсудить с учениками
* Почему робот в игре движется точнее, чем робот на поле?
* Что влияет на движение физической модели: например, вес, колеса, поверхность, моторы и размер конструкции?
* Почему робот может выйти за пределы поля, если в программе маршрут рассчитан правильно?
* Можно ли считать виртуальный эксперимент полноценной заменой реального испытания?
* Что произойдет, если инженер будет проектировать мост, механизм или транспортную систему только по идеальным расчетам?
До начала работы школьники не предполагали, что между навигацией в игре и движением реального робота будет такая большая разница. Но именно обнаружение этого разрыва стало главным образовательным результатом занятия. Ребята столкнулись с несоответствием виртуального и физического миров и начали решать проблемы по мере их появления. Они обсуждали возможные решения, модернизировали модель, рассчитывали количество оборотов, снова тестировали робота на поле и снова вносили изменения.
Так игра перестала быть просто игровой средой. Она стала безопасной моделью, где можно быстро освоить логику координат и маршрутов. А физический робот показал, что любая модель упрощает реальность.
Настоящий смысл занятия раскрывается именно в этом несовпадении, между задуманной траекторией и тем, что робот выдает на поле. Когда дети ищут причину расхождения и способ его преодолеть, у них запускается подлинное инженерное мышление.
Так игра перестала быть просто игровой средой. Она стала безопасной моделью, где можно быстро освоить логику координат и маршрутов. А физический робот показал, что любая модель упрощает реальность.
Настоящий смысл занятия раскрывается именно в этом несовпадении, между задуманной траекторией и тем, что робот выдает на поле. Когда дети ищут причину расхождения и способ его преодолеть, у них запускается подлинное инженерное мышление.
Как повторить модуль
Возраст: среднее школьное звено.
Оборудование: игра или симулятор с координатной навигацией, конструктор LEGO SPIKE Prime, поле для испытаний, интерактивная доска или общий экран для фиксации расчетов.
Задача: выбрать виртуальную модель, разобрать ее движение по координатам, собрать физический аналог, провести испытания, найти расхождения между расчетом и реальным движением, модернизировать конструкцию и повторить тест.
Важно не давать готовое решение. Ценность модуля именно в том, чтобы дети сами обнаружили разницу между игрой и реальностью.
Оборудование: игра или симулятор с координатной навигацией, конструктор LEGO SPIKE Prime, поле для испытаний, интерактивная доска или общий экран для фиксации расчетов.
Задача: выбрать виртуальную модель, разобрать ее движение по координатам, собрать физический аналог, провести испытания, найти расхождения между расчетом и реальным движением, модернизировать конструкцию и повторить тест.
Важно не давать готовое решение. Ценность модуля именно в том, чтобы дети сами обнаружили разницу между игрой и реальностью.